MoveIt! [Japanese]
- 前提 MoveIt!をインストールしておく.
sudo apt-get install ros-indigo-moveit-full公式ページ MoveIt!
http://moveit.ros.org/
MoveItのGUIツールを使う
roslaunch moveit_setup_assistant setup_assistant.launch
「Load Files」を押す.
「Regenerate Default Collision Matrix」のボタン押すだけ

motomanは地面に固定されているので設定しなくていいです.
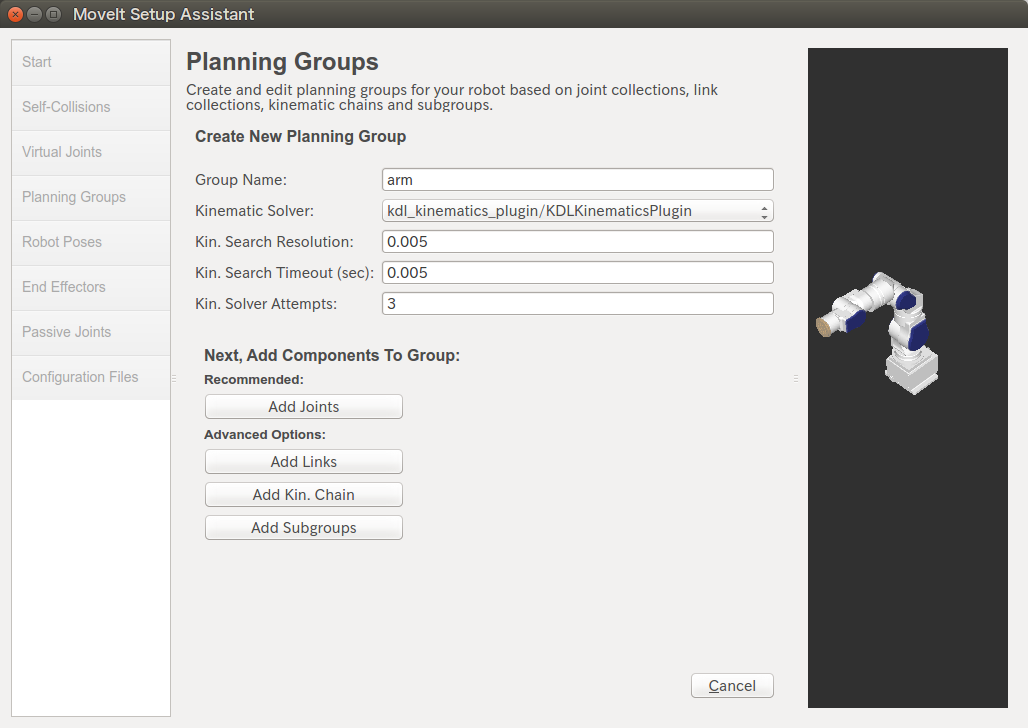
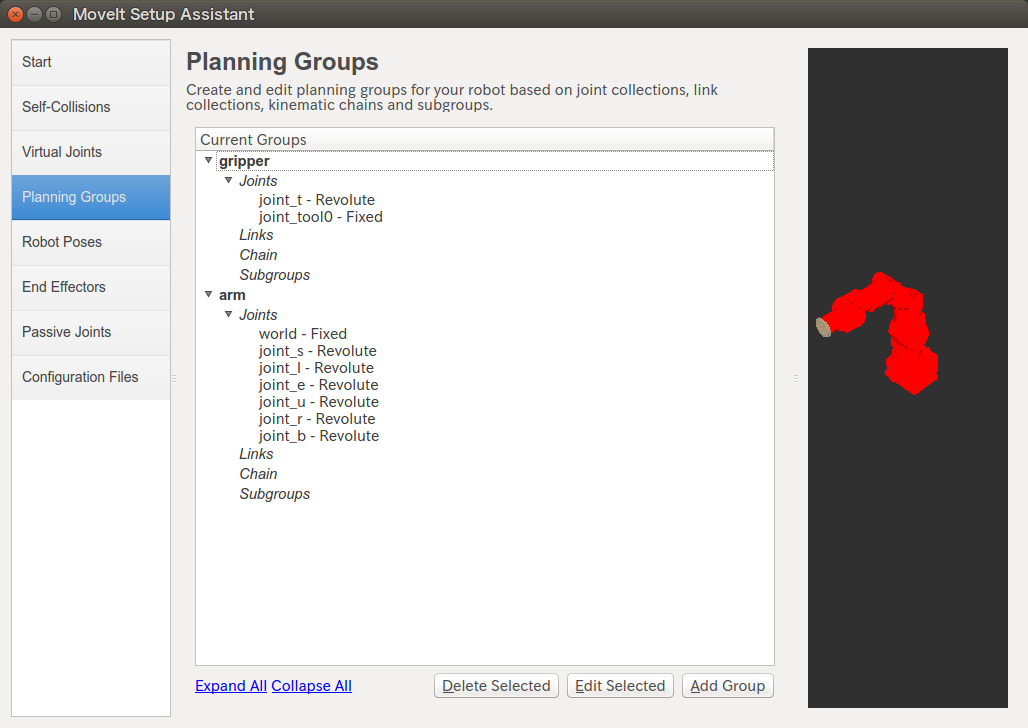
armグループとエンドエフェクタのgripperグループの2つに分けました.



運動学ソルバーとしてkdl_kinematics_plugin/KDLKKinematicsPluginを使用.
t軸(エンドエフェクタ)を除いた6自由度のアームとしてキネマティクスを解いてるっぽい(要確認)
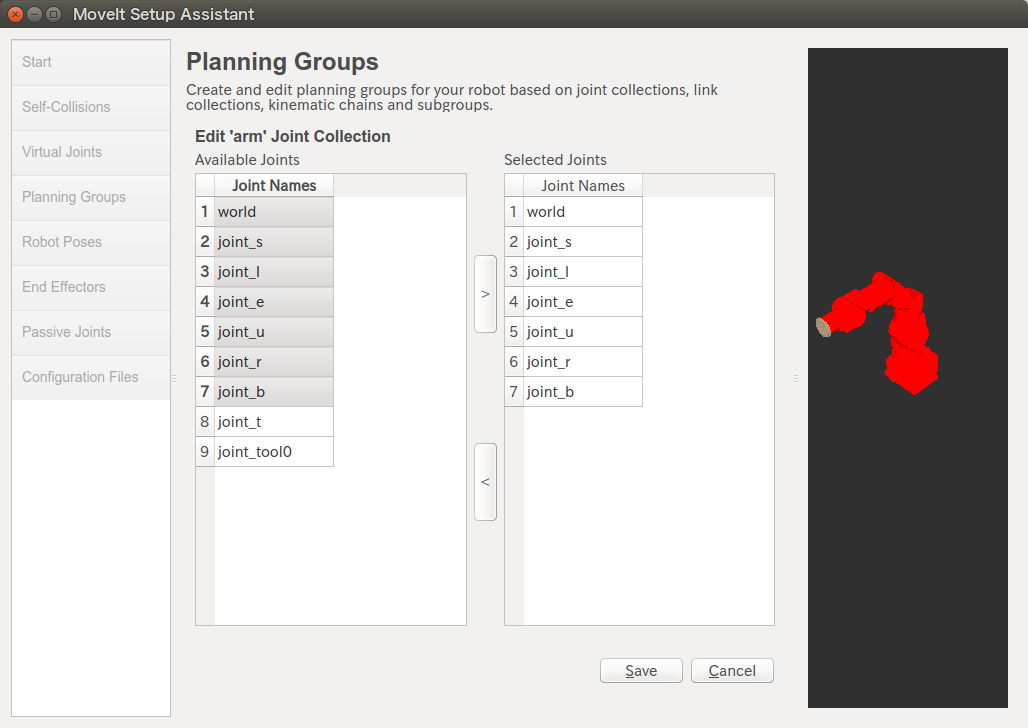
こんな感じでグループを作成しました.
ロボットアームの初期姿勢を複数設定する.各関節角度が0度と設定する以外にべつの姿勢を設定してみる.

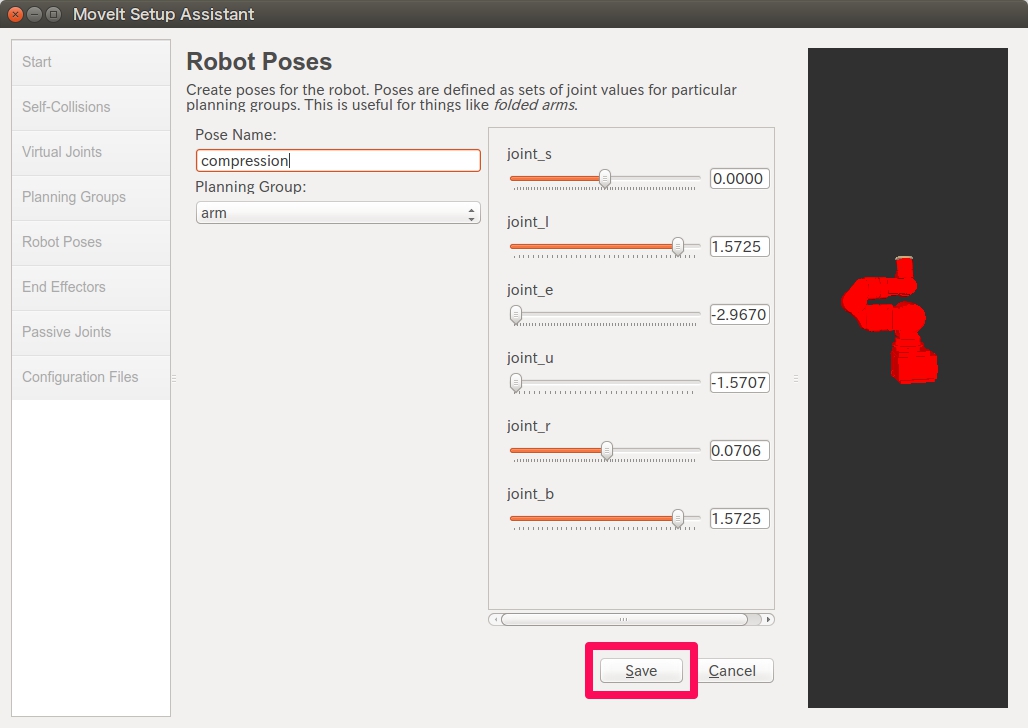
試しにロボットを畳んだ姿勢を登録してみた.
グリッパーの名前(自由に名前をつける),グループ名、親リンク、親グループの情報を入力する.

受動関節はないので省略.

最後,自分のモデルをMoveIt!化したファイルを保存する.
ファイル名はmotoman_sia5_moveit_configとしました.
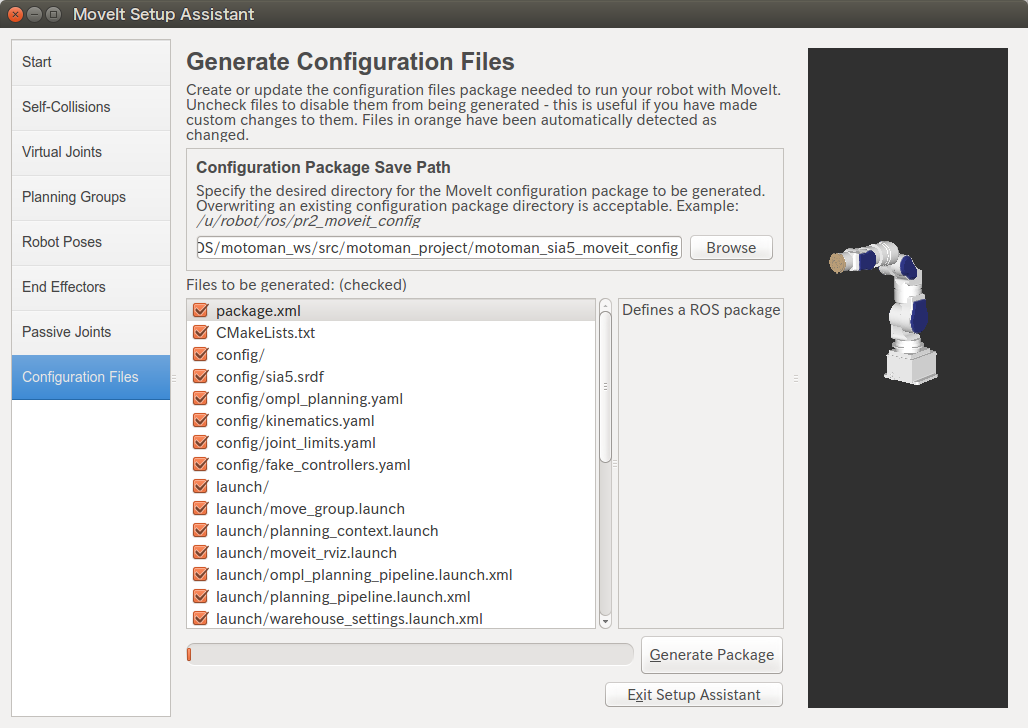
「Generate Package」を押して,保存が完了したら「Exit Setup Assistant」で終了させる.
roslaunch motoman_sia5_moveit_config demo.launchプランナを設定して...

自由に手をグリグリマウスで持っていって...
実行!!

Planned PathのShow Trailのチェックを入れると軌跡が見れるっぽいです.

